
Consideremos que a partícula pode executar um movimento qualquer no espaço, desta forma teremos uma grande possibilidade de movimentos. Neste capítulo iremos estudar os movimento 2D e 3D, retilíneos e curvilíneos.
Incluiremos o conceito de vetor de forma natural e intuitiva, inicialmente, para que possamos desenvolver este conceito ao longo do curso.
Como sabemos, um vetor é uma entidade matemática que é representada geometricamente no espaço por meio de um módulo (tamanho), uma direção e um sentido, o que lhe possibilita ser um segmento de reta orientado.
Se considerarmos um vetor , dizemos que este vetor é determinado pelo segmento de reta AB de origem em A e extremidade em B.
Vetor Posição é o vetor que localiza a partícula em relação ao referencial, marco zero. Podemos defini-lo como sendo
Os vetores , são os vetores unitários relacionados aos eixos coordenados e formam a base do espaço vetorial. Toda grandeza física vetorial pode ser representada por uma soma destes vetores canônicos.
Vetor Velocidade é o vetor que informa como o vetor posição está variando ao longo do tempo. Podemos defini-lo como sendo
A velocidade vetorial instantânea da partícula, tem a direção da reta tangente à trajetória no ponto onde se encontra a partícula nesse instante.
Vetor Aceleração é o vetor que informa como o vetor velocidade está variando ao longo do tempo. Podemos defini-lo como sendo
Qualquer que seja a direção da aceleração instantânea, o seu sentido jamais aponta para fora da concavidade da trajetória.
Podemos ainda, definir o vetor Deslocamento
O Vetor Velocidade Média
O Vetor Aceleração Média
Movimento 2D – Lançamento de Projéteis
Quando uma partícula se movimenta em um plano e apresenta uma velocidade com componentes vertical e horizontal, o movimento é dito 2D.
Os casos particulares do movimento 2D são o Lançamento Oblíquo e o Lançamento Horizontal
Sabe-se que estes movimentos são uma combinação dos movimento MRU e MRUV, de forma que, na direção x do movimento a velocidade a constante e na direção y do movimento a partícula é acelerada, g = 9,8 m/s². Todas as forças de resistência e de arrasto são desprezadas.
As equações que descrevem o movimento são, para o eixo y (MRUV)
para o eixo x (MRU)
As componentes da velocidade inicial da partícula são dadas por
Combinando-se as equações da posição, encontra-se a equação da trajetória da partícula, logo
Forma alternativa, utilizando-se o ângulo de lançamento
Define-se o Alcance R como sendo a distância horizontal do ponto inicial do lançamento ao ponto final do lançamento.
Define-se a Altura Máxima H como sendo a distância vertical do ponto de lançamento ao ponto máximo da posição ao longo do eixo vertical.
Para o caso particular em que a partícula é lançada da origem do sistema de referência, temos
Note que o alcance máximo ocorre quando o seno adquire o maior valor que é 1, logo, pela equação do alcance θ = 45°.
play_circle_filledNoções sobre vetores
play_circle_filled
play_circle_filled
Aplicações de Lançamento Oblíquo
play_circle_filledplay_circle_filled
play_circle_filled
Movimento Circular
O Movimento Circular é um exemplo de movimento em um plano, Movimento 2D, cuja trajetória da partícula é definida pela equação
onde, x e y são as coordenadas da partícula no plano xy e r é o raio da trajetória circular.
Podemos escrever esta equação em coordenadas polares considerando que
onde θ é a coordenada angular da partícula.
As coordenadas e os vetores de base para as coordenadas cartesianas e as coordenadas polares são, respectivamente
Temos que, é o vetor unitárito radial e
é o vetor unitário tangencial à trajetória circular.
Podemos determinar forma da de cada vetor de base em coordenadas polares como função dos vetores de base das coordenadas cartesianas, para isso devemos calcular a forma do vetor posição da partícula em movimento circular, assim
Vetor Posição em Coordenadas Polares
Definindo o vetor unitário radial
logo,
Podemos definir a grandeza velocidade angular média como
no SI a unidade física desta grandeza é rad/s.
A velocidade angular instantânea é definida por
Caso a velocidade angular mude com o tempo, a grandeza que mede a forma como a velocidade angular altera é a aceleração angular.
A aceleração angular média é definida por
no SI a unidade física desta grandeza é rad/s².
A aceleração angular instantânea α é definida por
Podemos determinar o vetor velocidade da partícula derivando-se o vetor posição em relação ao tempo
Utilizando-se a regra da cadeia
como o raio da trajetória circular é constante a derivada do raio em relação ao tempo é nula, assim
Definindo o vetor unitário tangencial
logo, o vetor velocidade da partícula fica
Podemos determinar a aceleração da partícula derivando-se a velocidade em relação ao tempo
Sabe-se que o raio da trajetória é constante e aplicando-se a regra da cadeia
o termo que precisamos derivar é
O vetor aceleração da partícula fica
Vemos que a aceleração radial aponta para o centro da trajetória, é chamada de aceleração centrípeta.
Neste ponto podemos fazer uma análise do movimento circular classificando-o como MCU e MCUV.
Movimento Circular Uniforme – MCU
As características deste movimento são
O MCU é um movimento acelerado.
Movimento Circular Uniformemente Variado – MCUV
As características deste movimento são
Movimento Curvilíneo
Para o caso em que a trajetória curvilínea for expressa por y=f(x), e o raio de curvatura ρ em qualquer ponto sobre a trajetória é determinado pela equação
As características deste movimento são
A velocidade da partícula é sempre tengente à trajetória e a componente radial da aceleração é o resultado da taxa de variação temporal da velocidade. Esta componente está sempre direcionada para o centro de curvatura da trajetória.
Movimento Relativo
Tomemos o exemplo onde um marinheiro ao lado da base do mastro de um navio lança uma bola de canhão para cima, tentando alcançar o topo do mastro. Ele vê a bola subindo, alcançando o topo do mastro e caindo em linha reta até sua posição, mesmo se o navio estiver em movimento retilíneo uniforme. No entanto, para um segundo marinheiro parado observando da margem do rio o navio em movimento, a trajetória da bola de canhão é parabólica.
As descrições cinemáticas que os dois observadores fornecem do movimento do projétil são diferentes, mas as descrições dinâmicas são coincidentes: eles medem aceleração nula para o movimento horizontal do projétil (), mesma aceleração na direção vertical (
) , mesmo tempo do movimento.
O princípio da relatividade diz que, afim de que a natureza, a Física, tenha o mesmo comportamento quando experimentada ou descrita por diferentes observadores inerciais, é necessário que as equações da física tenham a mesma forma matemática em todos os referenciais inerciais, a mesma estrutura de dependência entre as grandezas fisicamente relevantes.
Consideremos a figura a seguir, tem-se dois referenciais inerciais, com o referencial A em repouso e o referencial B em movimento retilíneo uniforme, definindo os vetores como
Vetor Posição que localiza o referencial B em relação ao referencial A
Vetor Posição que localiza a partícula em relação ao referencial A
Vetor Posição que localiza a partícula em relação ao referencial B
Vetor Velocidade do referencial B em relação ao referencial A
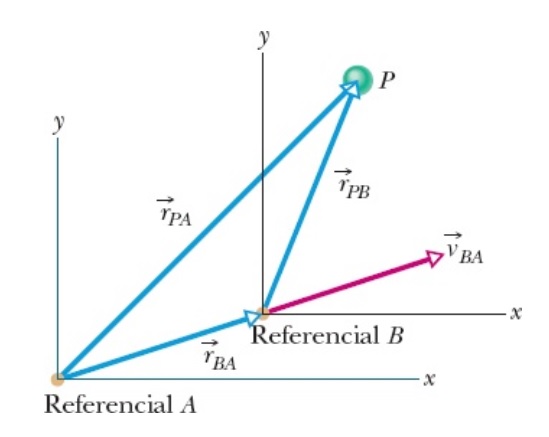
Utilizando a soma de vetores, temos que
Se derivarmos em relação ao tempo, obteremos
Se derivarmos novamente em relação ao tempo, obtemos
Como a derivada em relação ao tempo da velocidade do referencial B em relação ao tempo é nula, porque esta velocidade é constante, tem-se
logo,
Se a aceleração do referencial em movimento (Referencial B) for diferente de zero, ou seja, se a velocidade de B não for constante, tem-se
Este resultado é conhecido como o princípio da relatividade.
play_circle_filledBIBLIOGRAFIA
HIBBELER, R. C. Dinâmica: Mecânica para Engenharia. Edição: 12 ed. São Paulo (SP): Pearson Universidades, 2010.
NUSSENZVEIG, H. M. Curso de Física Básica: Mecânica. Edição: 5 ed. [s.l.] Blucher, 2013.
RESNICK, R.; WALKER, J.; HALLIDAY, D. Fundamentos de Física – Volume 1 – Mecânica. Edição: 10 ed. [s.l.] LTC, 2016.
SERWAY, R.; JEWETT, J. Princípios de física – vol. I: Volume 1. Edição: 2 ed. [s.l.] Cengage Learning, 2014.
YOUNG, H. D.; FREEDMAN, R. A. Física de Sears & Zemansky: Volume I: Mecânica: Volume 1. Edição: 14 ed. [s.l.] Pearson Universidades, 2015.