
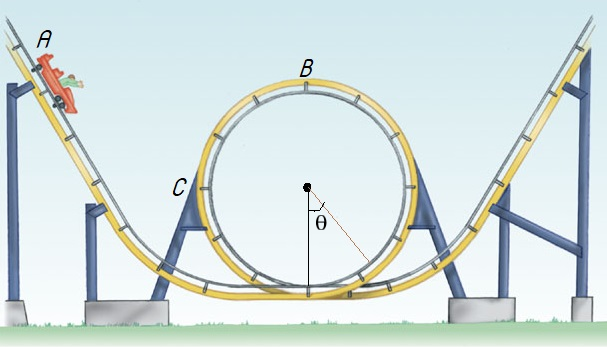
Um carro, com 1300 kg de massa, em um parque de diversões se desloca sem atrito ao longo da pista indicada na figura 1.
No diagrama esquemático da figura 2, o carro parte do repouso no ponto A situado a uma altura h acima da base do círculo com raio igual a R. Considera o carro como uma partícula.

I – Considere o caso em que e que
, a velocidade da partícula se anula para qualquer valor de θ no intervalo informado, quando a força normal que a pista exerce sobre o carro é dada por:
e o ângulo em que ocorre isto for dado por:
II – Considere o caso em que e que
, a força normal se anula, para qualquer valor de θ no intervalo informado, quando a velocidade do carro for dada por:
e o ângulo em que ocorre isto for dado por:
III – Mostre que se o carro executar o looping , a força normal que a pista exerce sobre o carro nos pontos B e C é:
e que as acelerações radial, tangencial e resultante são dadas por:
com as velocidades em B e C dada por:
Construção do Simulador
1 – O usuário deve ser informar o valor do raio de curvatura da pista, que deve pertencer ao intervalo ;
2 – O usuário deve ser informar o valor da altura acima da base do looping ao ponto A, que deve pertencer ao intervalo ;
3 – O programa deve informar a velocidade , a força normal exercida pela pista sobre o carro N, o ângulo em que ocorre um dos eventos listado no desenvolvimento do modelo θ, e as acelerações radial, tangencial e resultante se o carro chegar a executar o looping;
4 – O autor do projeto deve considerar as condições desenvolvidas acima.
Exemplos de retorno de dados
Caso 1 – Se R = 20 m e h = 0,5R
Retorno do modelo:
Caso 2 – Se R = 20m e h = 2R
Resultado do modelo:
Caso 3 – Se R = 20m e h = 2,5R
Resultado do modelo:
Bom trabalho!